Biểu diễn trực quan các vector trong mặt phẳng và trong không gian.
Giới thiệu \(R_{2}\) và \(R_{3}\)—hệ cơ sở của \(R_{2}(i, \, j)\) và \(R_{3}(i, \, j, \, k)\text{.}\)
Tổng quát hóa cho \(R_{n}\)—hệ cơ sở của \(R_{n}(e_{1}, \, e_{2}, \, \ldots, \, e_{n})\text{.}\)
Tiểu Mục1.6.1Vector cơ sở
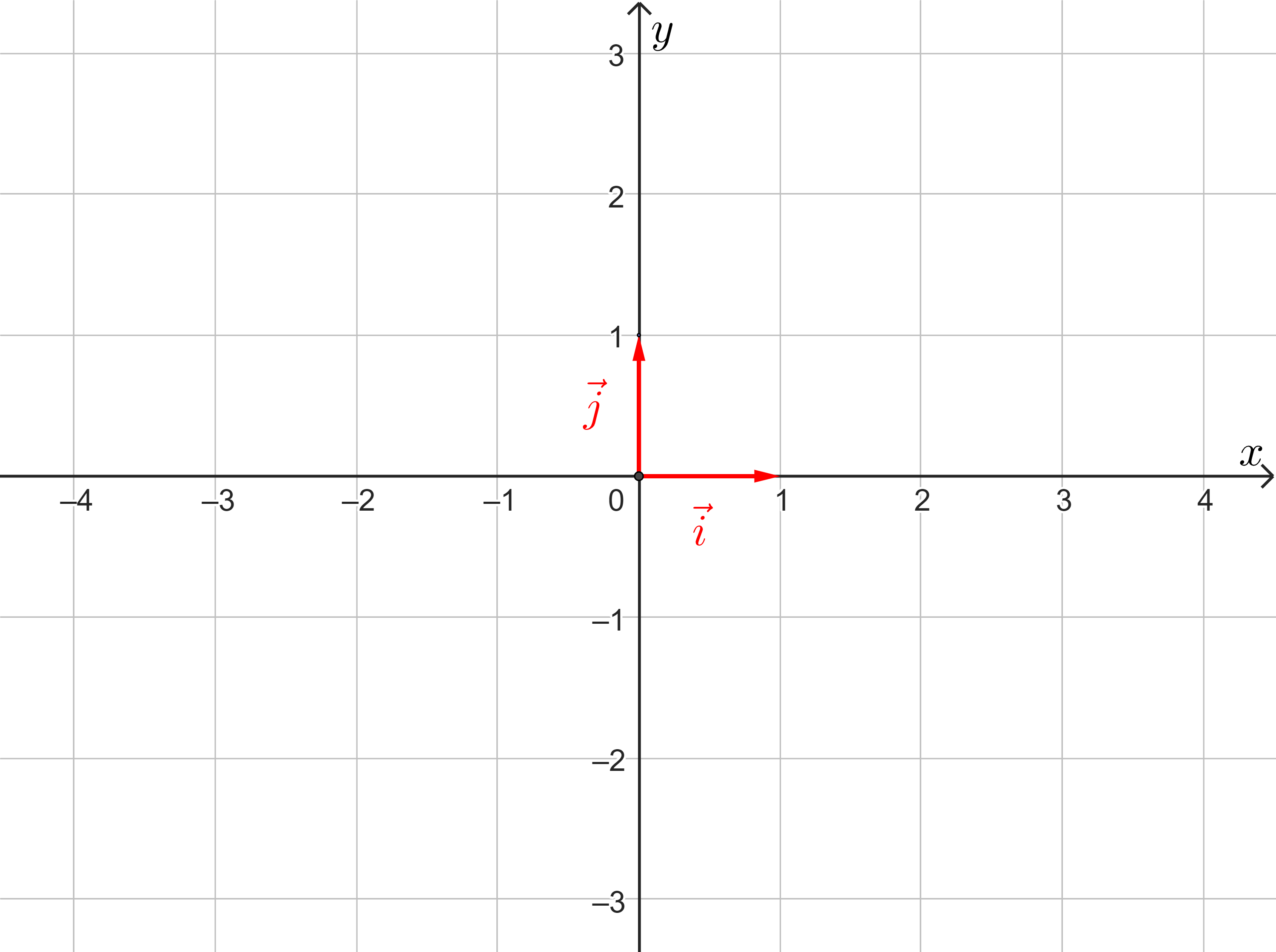
Giả sử ta có 1 vector \(a = \sbmat{3 \\ 2}\text{.}\) Để hình dung vector này trong không gian 2D, ta có thể sử dụng đến sự hỗ trợ của 2 vectors cơ sở cơ bản \(\vec{i} = \sbmat{1 \\ 0}\) và \(\vec{j} = \sbmat{0 \\ 1}\text{.}\)
Ta bắt đầu từ điểm \(O(0, 0)\text{,}\) còn được gọi là gốc tọa độ.
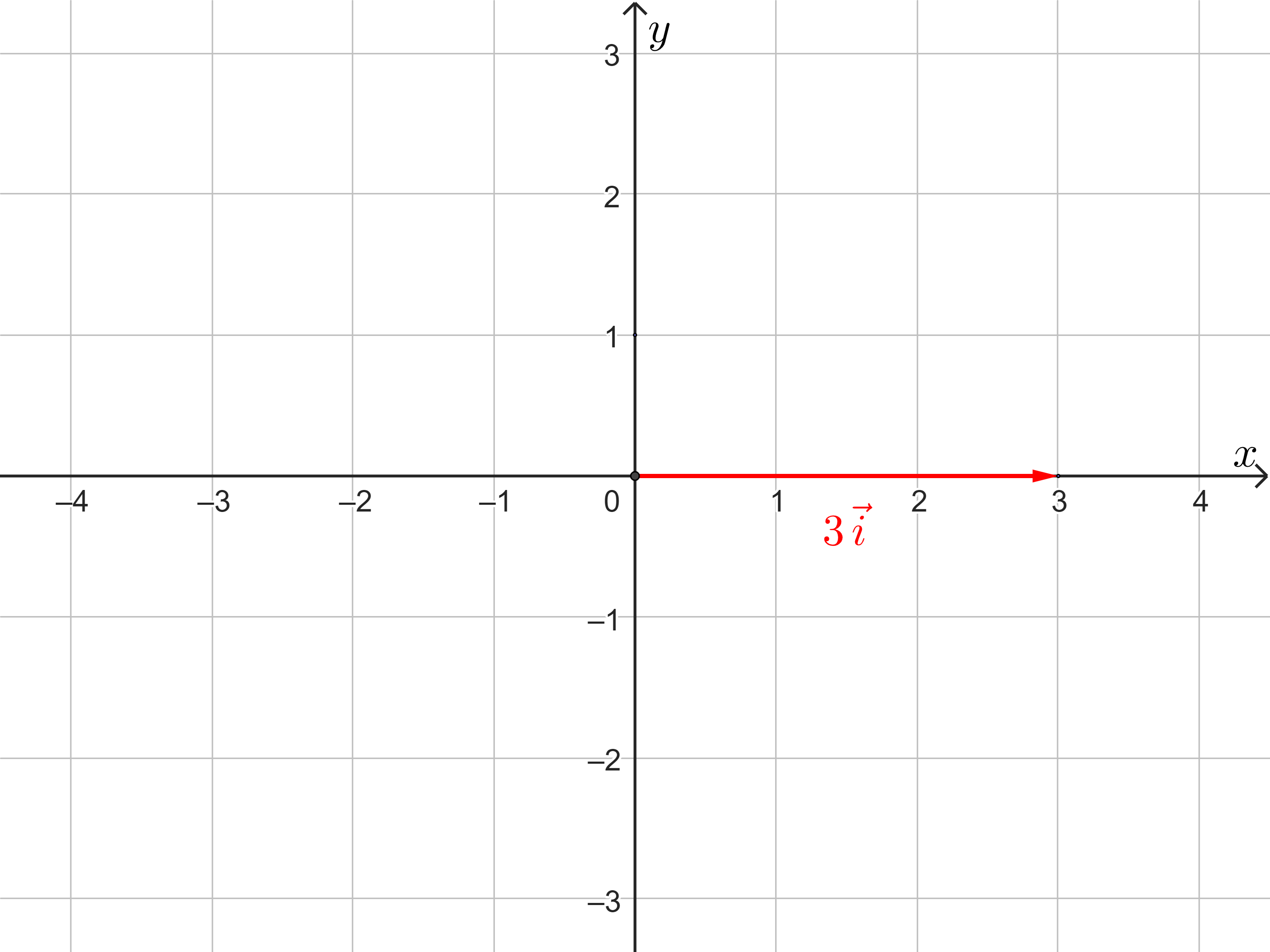
Đầu tiên, chúng ta có thể đi đến điểm \((3, 0)\) trên trục \(Ox\) bằng cách đi sang bên phải \(3\) đơn vị. Vector \(\vec{i}\) sẽ giúp ta làm việc đó. Ta chỉ cần“kéo dài” \(\vec{i}\) lên \(3\) lần sẽ được 1 vector mới \(3\vec{i} = \sbmat{3 \\ 0}\text{.}\)
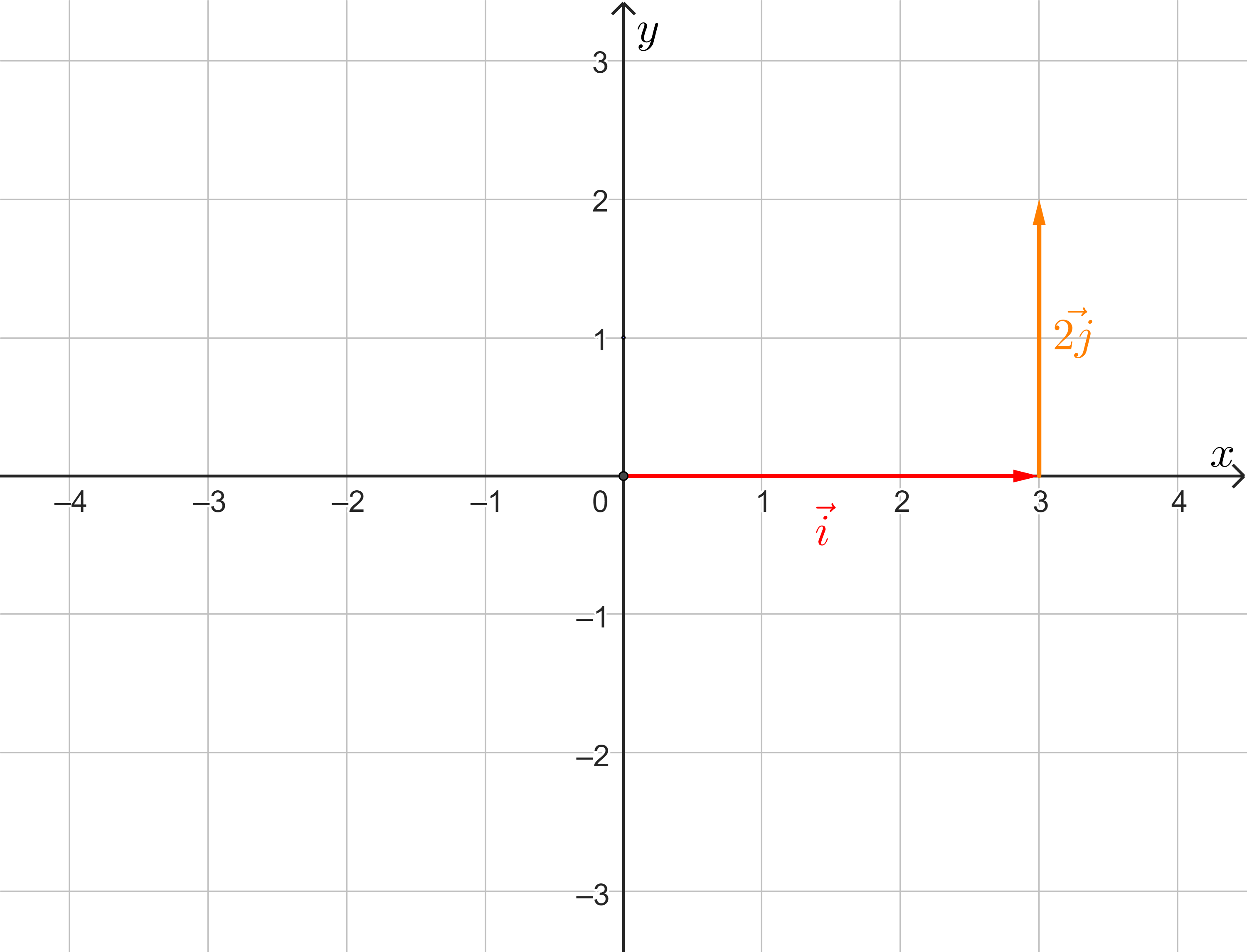
Tiếp theo, chúng ta sẽ đi lên trên \(2\) đơn vị. Tương tự, ta chỉ việc “kéo dài” \(\vec{j}\) lên \(2\) lần sẽ được vector \(2\vec{j} = \sbmat{0 \\ 2}\text{.}\)
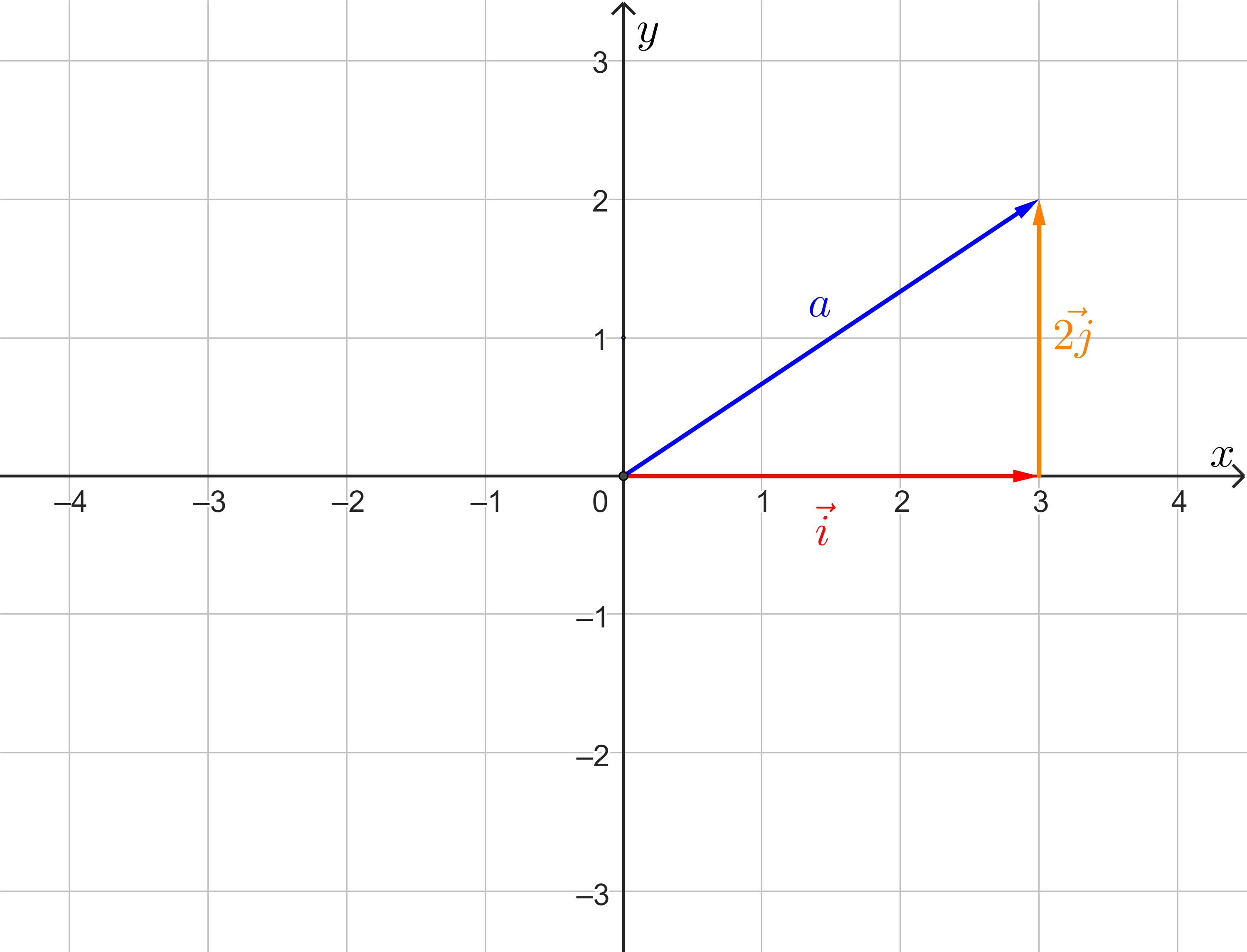
Cuối cùng, ta cộng hai vectors mới với nhau để được kết quả là \(3\vec{i} + 2\vec{j} = a = \sbmat{3 \\ 2}\text{.}\)